
À propos de l'entreprise
Independent Robotics (Société de robotique indépendante SRI) développe des systèmes qui permettent aux machines autonomes d’accomplir des tâches hors de portée pour les êtres humains. Les solutions conçues par l'entreprise tirent parti des avancées en intelligence artificielle, de l’apprentissage automatique, des réseaux neuronaux et du traitement visuel. SRI s’appuie sur une vaste communauté de chercheurs qui repoussent les limites de la recherche en robotique.
NOTRE VISION
Enrichir les compétences humaines par la conception de machines intelligentes.
NOTRE MISSION
En repoussant les limites de la robotique et de l'intelligence artificielle, concevoir des systèmes qui permettent aux machines autonomes de faire ce que les humains ne peuvent pas faire.
About Us
Independent Robotics creates systems for autonomous machines to do what humans cannot. The company’s solutions are built on a foundation of AI capabilities, machine learning, neural networks, vision processing and is tapped into a broad community of researchers pushing the boundaries of robotics research.
OUR VISION
To extend human capability through intelligent machine design.
OUR MISSION
Pushing the boundaries of AI and robotics, we create systems for autonomous machines to do what humans cannot.

Our Innovation
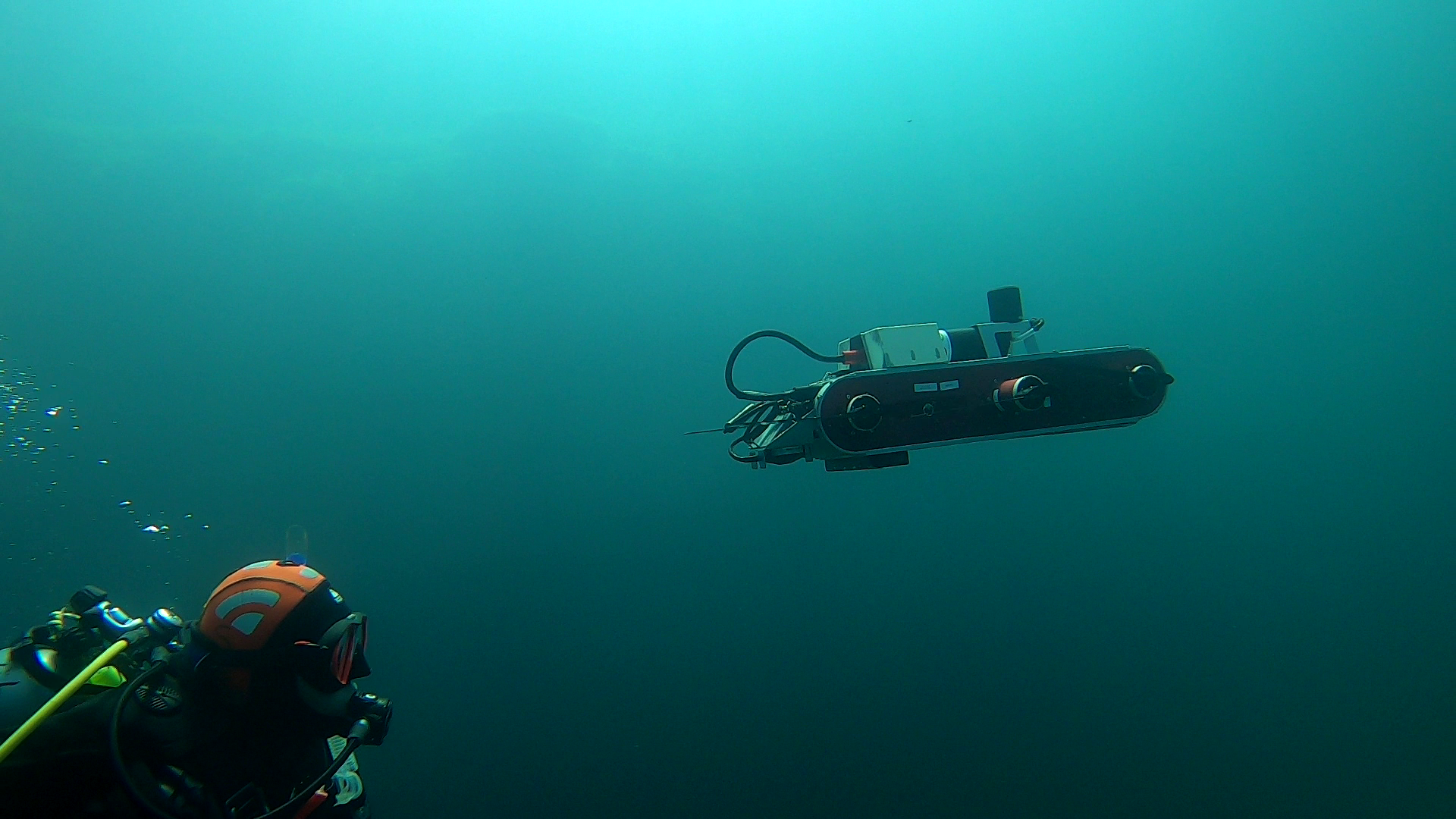
Aqua2 Mk3, autonomous robot submersible

1 m/s top speed
64 x 44 x 13 cm / 25 x 17 x 5 inches
~16.5 kg / 36.4 lbs.
Max depth of 35m / 130ft
GPU allows on-board ML for tasks like visual processing
Cameras, IMU, compass, depth sensor, DVL, sonar, USBL, GPS
Notre innovation
Aqua2 Mk3, submersible robotisé autonome
Deployed in numerous environments with over 1000 hours of field usage
Has been used for many different experiments:
Coral reef mapping & underwater SLAM
Interest-driven data collection
Multi-agent coordination
ML driven vision-based collision avoidance
Robot-diver collaboration & communication
Terrain identification from haptic feedback
Gait design and optimization (Classical and RL approaches)
Vitesse maximale - 1 m/s
Dimensions : 64 x 44 x 13 cm / 25 x 17 x 5 pouces
Poids : ~16,5 kg / 36,4 lbs.
Profondeur maximale : 35 m / 130 pieds
Le processeur graphique (GPU) autorise tâches d’apprentissage automatique comme le traitement visuel.
Plateforme multifonctionnelle : Caméra, IMU, compas, capteur de profondeur, DVL, sonar, USBL, GPS
Utilisable dans un large éventail d'environnements, avec plus de 1 000 heures d'utilisation sur le terrain.
Facile à déployer et versatile, quelques missions courantes :
Cartographie des récifs coralliens et SLAM sous-marin
Collecte de données basée sur les intérêts
Coordination multi-agents
Évitement des collisions basé sur la vision et piloté par ML
Collaboration et communication robot-plongeur
Identification du terrain basée sur le retour haptique
Conception et optimisation de la démarche (approches classiques et RL)






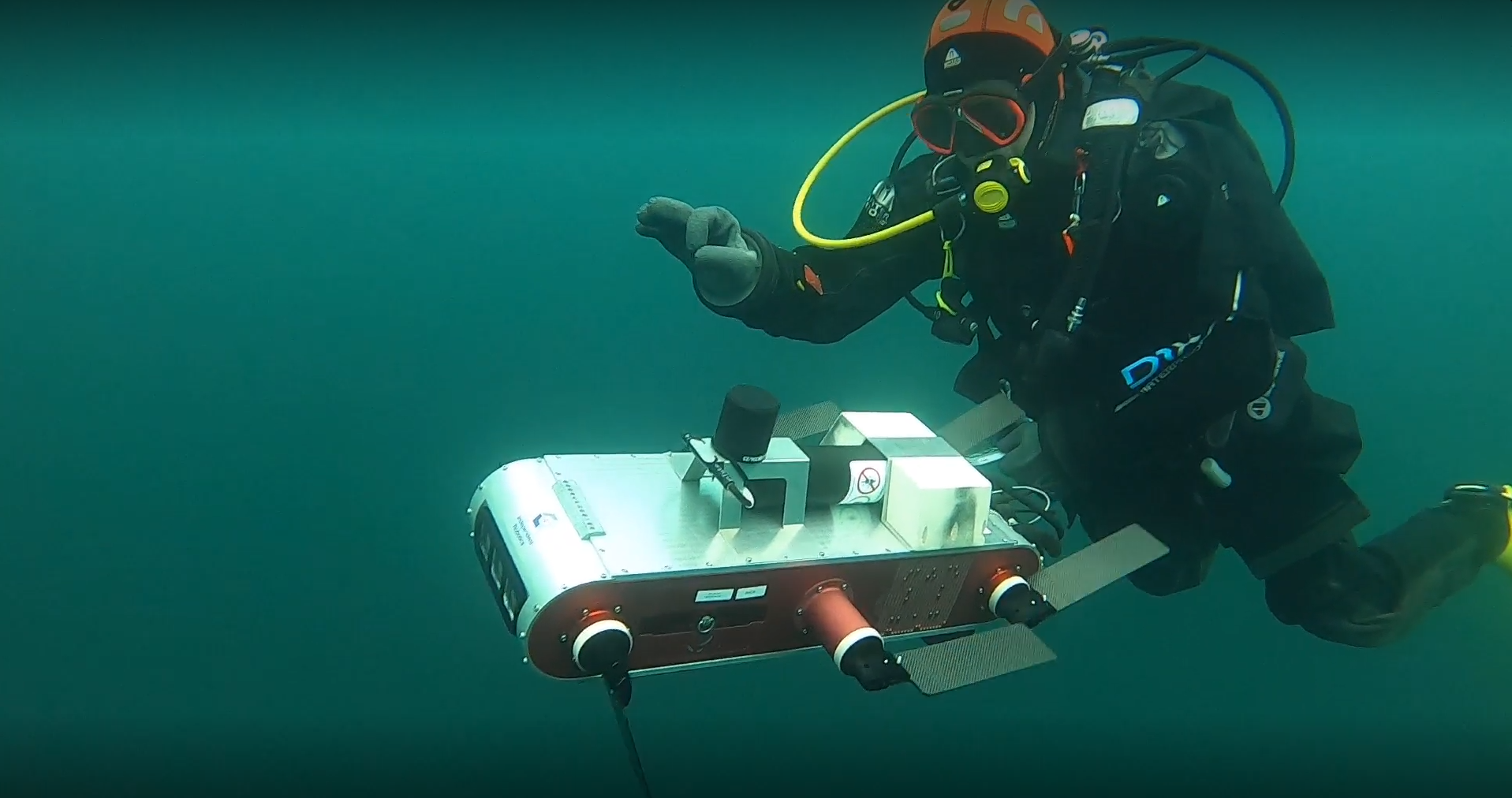

Collaboration avec la Marine Royale Canadienne
Nous sommes engagés dans un projet transformateur, pour redéfinir l'exploration maritime, à travers trois étapes cruciales:
Inspection de coque en mode câblé (novembre 2022)
Fusionnant contrôle manuel et collecte de données en temps réel, nous avons réalisés une inspection visuelle de la coque du navire de la Classe Harry DeWolf, préparant ainsi le terrain pour l'avenir.
Inspection autonome des fonds marins (mai 2023)
En mode autonome, nous avons navigué avec succès un parcours tracé en profondeur, à l'aide de planificateurs et de capteurs avancés, révélant ainsi des informations précieuses.
Compagnon de plongée autonome (septembre 2023)
En soutenant les plongeurs à l’entrainement et dans l’exécution de missions sous-marines, notre technologie de pointe ouvre la voie en combinant expertise et innovation, et bonifie les habiletés des scaphandres autonomes.
Collaboration with Royal Canadian Navy
Embarking on a transformative journey, we ventured to redefine maritime exploration through three key phases:
Tethered Hull Inspection (Nov 2022)
Merging manual control with real-time data collection, we inspected the Harry DeWolf-class vessel's hull, setting the groundwork.
Autonomous Seafloor Inspection (May 2023)
Embracing autonomy, we navigated the depths using advanced planners and sensors, uncovering hidden insights.
Autonomous Diver Companion (Sep 2023)
Aiding divers in training and underwater tasks, our technology leads the way, uniting expertise and innovation.